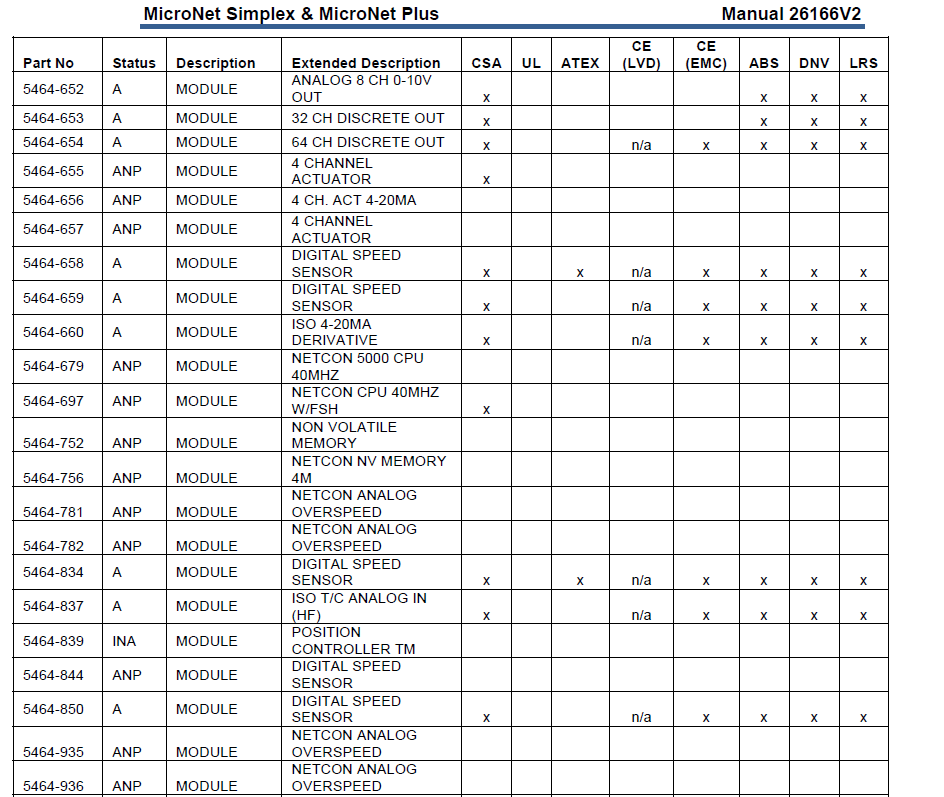
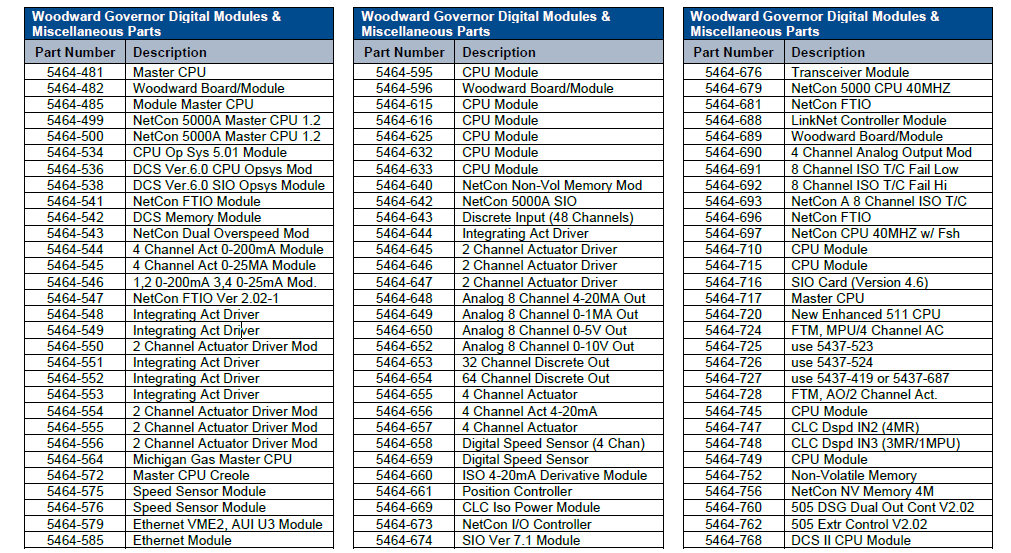
Цифровий датчик швидкості Woodward 5464-659

Опис
| Виробництво | Вудворд |
| Модель | 5464-659 |
| Інформація для замовлення | 5464-659 |
| Каталог | Цифрове керування MicroNet |
| Опис | Цифровий датчик швидкості Woodward 5464-659 |
| Походження | Сполучені Штати (США) |
| Код ТН ЗС | 85389091 |
| Вимір | 16 см * 16 см * 12 см |
| Вага | 0,8 кг |
Деталі
Модуль інтелектуального вводу/виводу має власні вбудовані мікроконтролери. Модулі, описані в цьому розділі, є модулями інтелектуального вводу/виводу. Під час ініціалізації інтелектуального модуля мікроконтролер модуля перемикає
Світлодіод вимикається після успішного самотестування ввімкнення живлення та ініціалізації модуля процесором. Світлодіод світиться, щоб вказати на помилку вводу/виводу.
ЦП також повідомляє цьому модулю, в якій групі швидкостей має працювати кожен канал, а також будь-яку спеціальну інформацію (наприклад, тип термопари у випадку модуля термопари). Під час виконання ЦП періодично надсилає «ключ» усім платам вводу/виводу, повідомляючи їм, які групи швидкостей мають бути оновлені в цей час.
Завдяки цій системі ініціалізації/розсилки ключів кожен модуль вводу/виводу обробляє власне планування груп швидкостей з мінімальним втручанням процесора. Ці інтелектуальні модулі вводу/виводу також мають вбудоване онлайн-виявлення несправностей та автоматичне калібрування/компенсацію. Кожен вхідний канал має власну прецизійну напругу.
опорне значення. Раз на хвилину, коли не зчитуються входи, вбудований мікроконтролер зчитує це опорне значення. Потім мікроконтролер використовує ці дані, зчитані з опорного значення напруги, як для виявлення несправностей, так і для автоматичної температурної компенсації/калібрування.
Для очікуваних показників, коли вбудований мікроконтролер зчитує кожне значення опорної напруги, встановлено обмеження. Якщо отримані показники виходять за ці межі, система визначає, що вхідний канал, аналого-цифровий перетворювач або прецизійний опорний сигнал напруги каналу не функціонують належним чином. Якщо це трапляється,
Мікроконтролер позначає цей канал як такий, що має несправність. Потім процесор виконає будь-які дії, передбачені інженером-застосовувачем у прикладній програмі.
Інтелектуальний модуль виводу контролює вихідну напругу або струм кожного каналу та сповіщає систему про виявлення несправності. Кожен модуль вводу/виводу має запобіжник. Цей запобіжник видно та його можна замінити через виріз у пластиковій кришці модуля. Якщо запобіжник перегорів, замініть його запобіжником того ж типу та розміру.
На рисунку 10-3 зображено блок-схему двоканального модуля контролера приводу. Кожен канал керує інтегруючим або пропорційним, гідромеханічним або пневматичним приводом. Кожен привод може мати до двох пристроїв зворотного зв'язку за положенням. Доступні кілька версій, а номер деталі модуля вказує на максимальну вихідну струмову здатність модуля. З цим модулем необхідно використовувати дискретний (сірий) кабель MicroNet низької щільності. Не використовуйте аналоговий (чорний) кабель.
Цей модуль драйвера виконавчих механізмів отримує цифрову інформацію від процесора та генерує чотири пропорційні сигнали драйвера виконавчих механізмів. Ці сигнали є пропорційними, а їхній максимальний діапазон становить від 0 до 25 мА постійного струму або від 0 до 200 мА постійного струму.
На рисунку 10-5 зображено блок-схему чотириканального модуля драйвера виконавчих механізмів. Система записує вихідні значення в двопортову пам'ять через інтерфейс шини VME. Мікроконтролер масштабує значення, використовуючи калібрувальні константи, що зберігаються в EEPROM, і планує вихідні сигнали у відповідний час. Мікроконтролер контролює вихідну напругу та струм кожного каналу та попереджає систему про будь-які несправності каналу та навантаження. Система може окремо вимикати драйвери струму. Якщо виявлено несправність, яка перешкоджає роботі модуля, або мікроконтролером, або системою, засвітиться світлодіод FAULT.